.svg)
 By
By
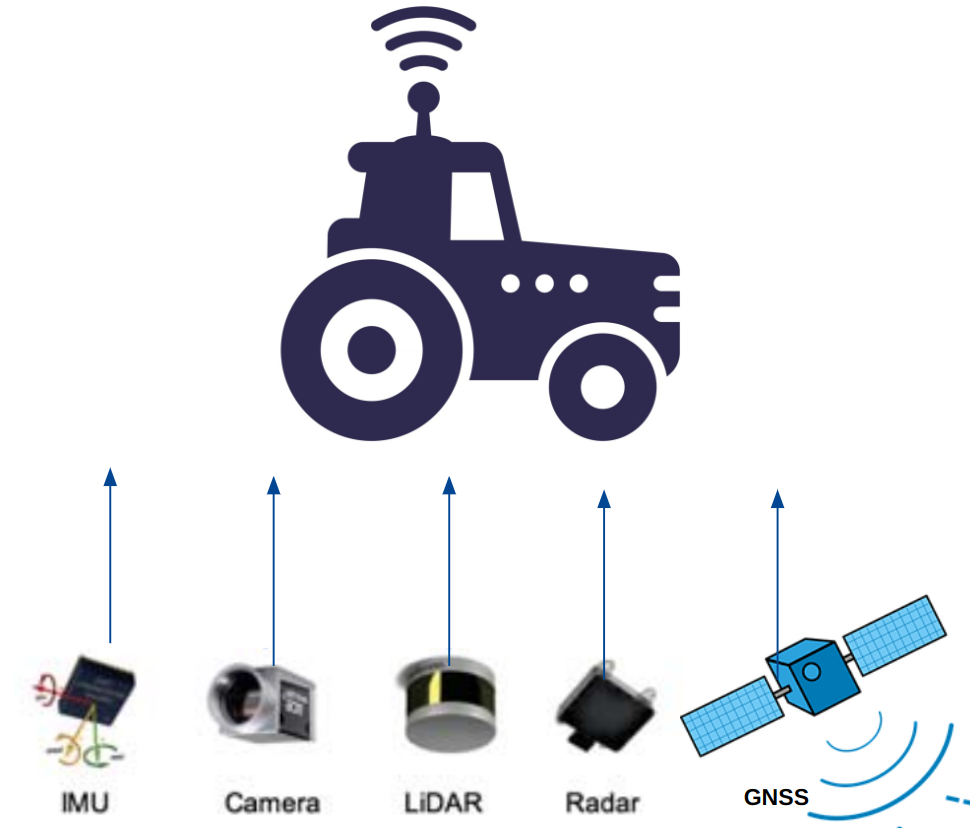
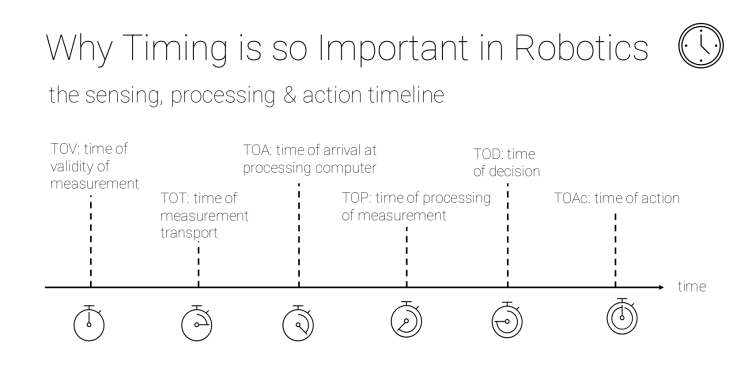
One of the challenges faced by robotic system designers is to decide which sensors to include in their systems. Several factors come into play, such as weight, power consumption, cost, accuracy, operating range, and robustness. The ultimate goal of the sensor payload is to estimate internal states, such as the position and orientation of the robot, and external states, such as range and bearing to an object of interest. This is typically achieved through fusing measurements from different sensors into a single coherent state estimate.
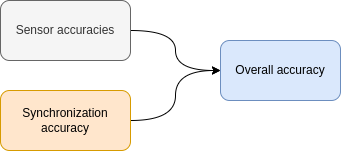
A key insight is that the overall accuracy of the sensor fusion algorithm is limited by one out of two factors.
1. The accuracy of the individual sensor measurements.
2. The accuracy of the time synchronization between the different sensors.
If your system is limited by the accuracy of the time synchronization between sensors, then purchasing a more expensive and more accurate sensor will not improve your overall accuracy.
For a given time synchronization accuracy there will be an optimal sensor accuracy, improvements beyond this optimal point will not result in increased overall accuracy.